DSA - 搜索树应用
不在期中考察范围内,鉴于完全没听懂所以抄了一遍 ppt。
区间树
穿刺查询:给定一组区间,对任何点 qx,筛选出所有包含该点的区间。
考查所有区间的交非空的情形,取公共交点 m,分别依左端点、右端点排序得到区间列 L,R。
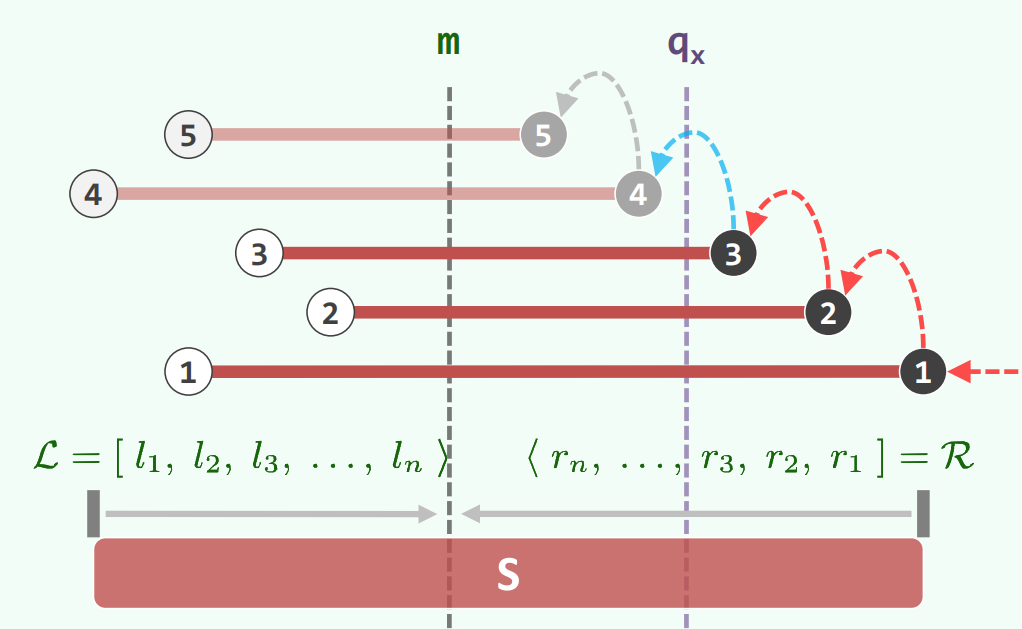
不失一般性,取 qx>m,区间是否被刺中只取决于右端点是否足够靠右。
取出 R 序列由远及近检视,共 O (r + 1)
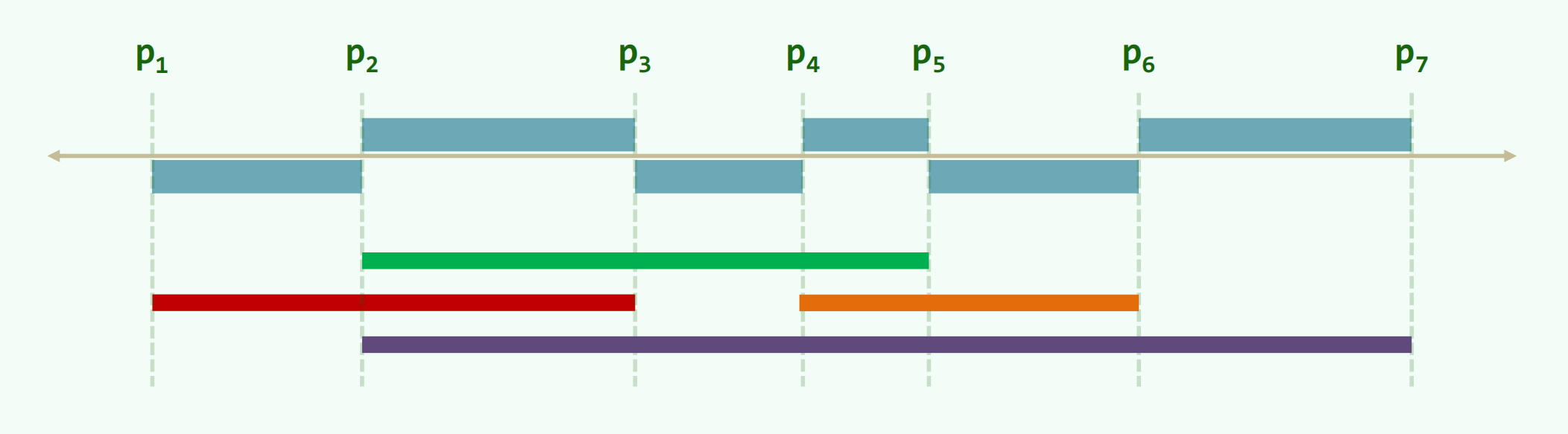
分治:取所有端点中位点 xmid,将原有区间组分成三部分。Sleft 右端点全在 x 左侧,Smid 包含 x。
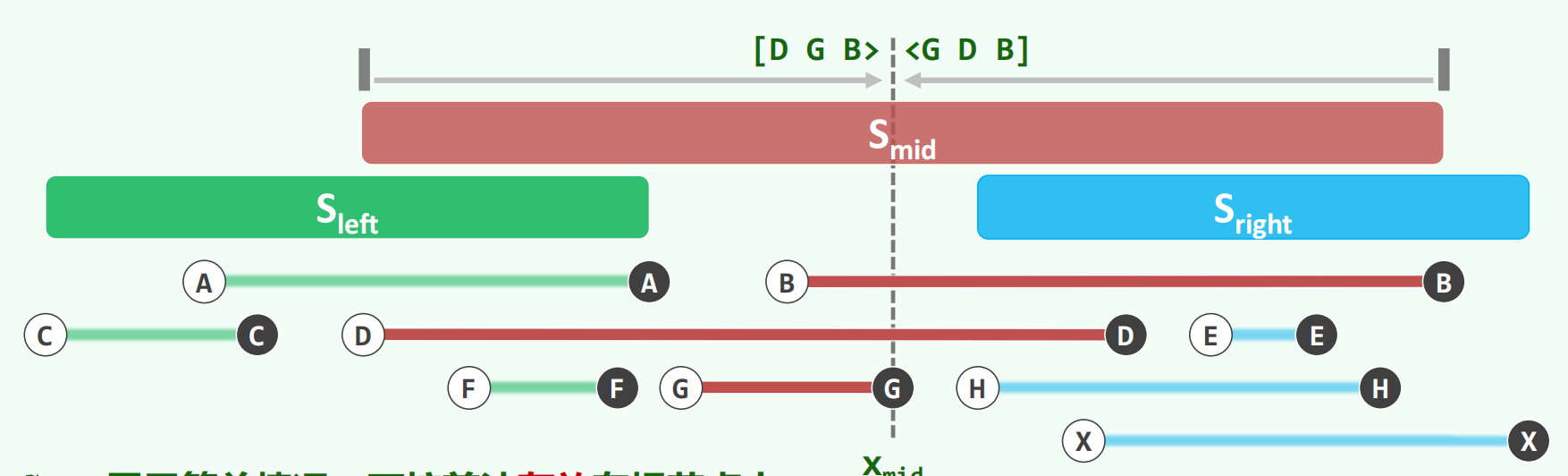
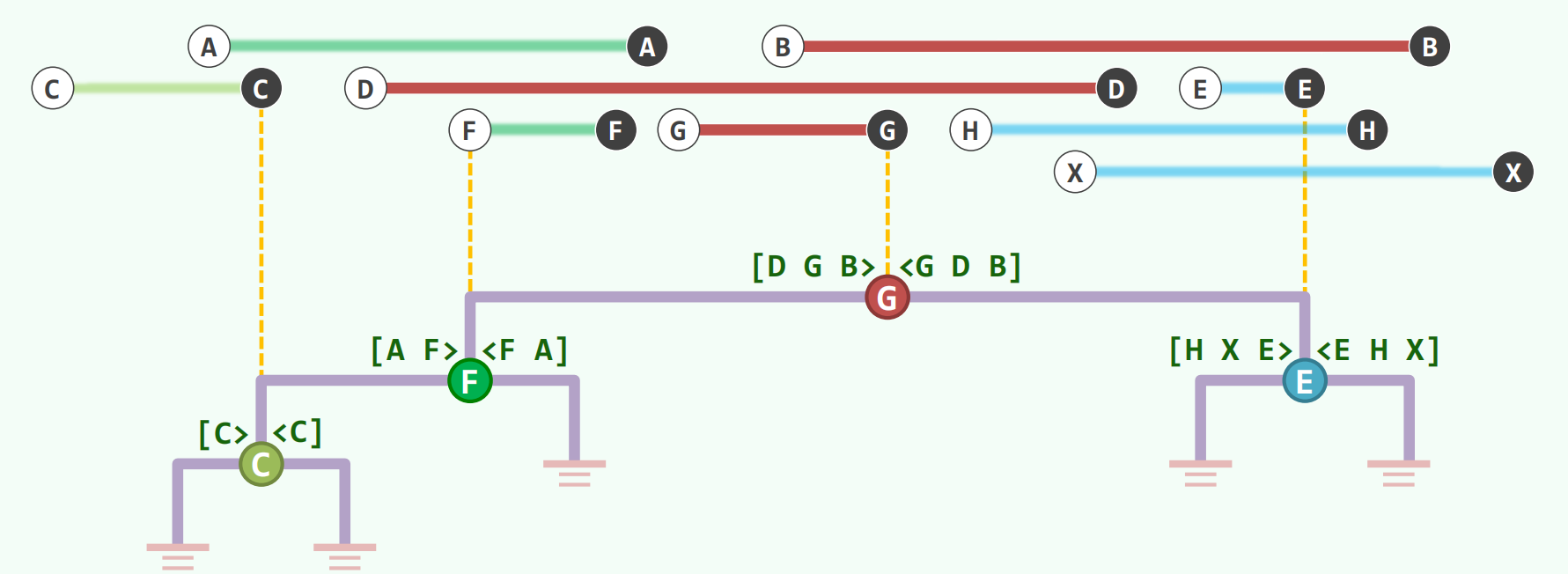
以此构建搜索树,把 Smid 存放在根节点,Sleft 和 Sright 分别交给左右子树。然后递归的划分。
也就是说,对于每个节点,排序自己的所有区间,然后分配左右区间给左右子树。
对于 Smid 似乎需要在节点内部维护两个列表 L,R。整个树会把所有区间存储 2 遍,所以空间是 O (n)
对于根节点,需要遍历所有 n 个区间;对于每一层,每个节点只需要遍历分配给自己的 Sleft 或者 Sright,累计加在一起也就是 n 个区间。
可以在最开始把所有的 2n 个端点排好序,然后每次挑选中间点都是线性的。
于是每一层的时间复杂度都是线性。
树的渐进高度是 logn,最坏情况是根节点只有 1 个区间,左右子树平均分;最好是占有所有区间。
总的时间复杂度 O (nlogn)
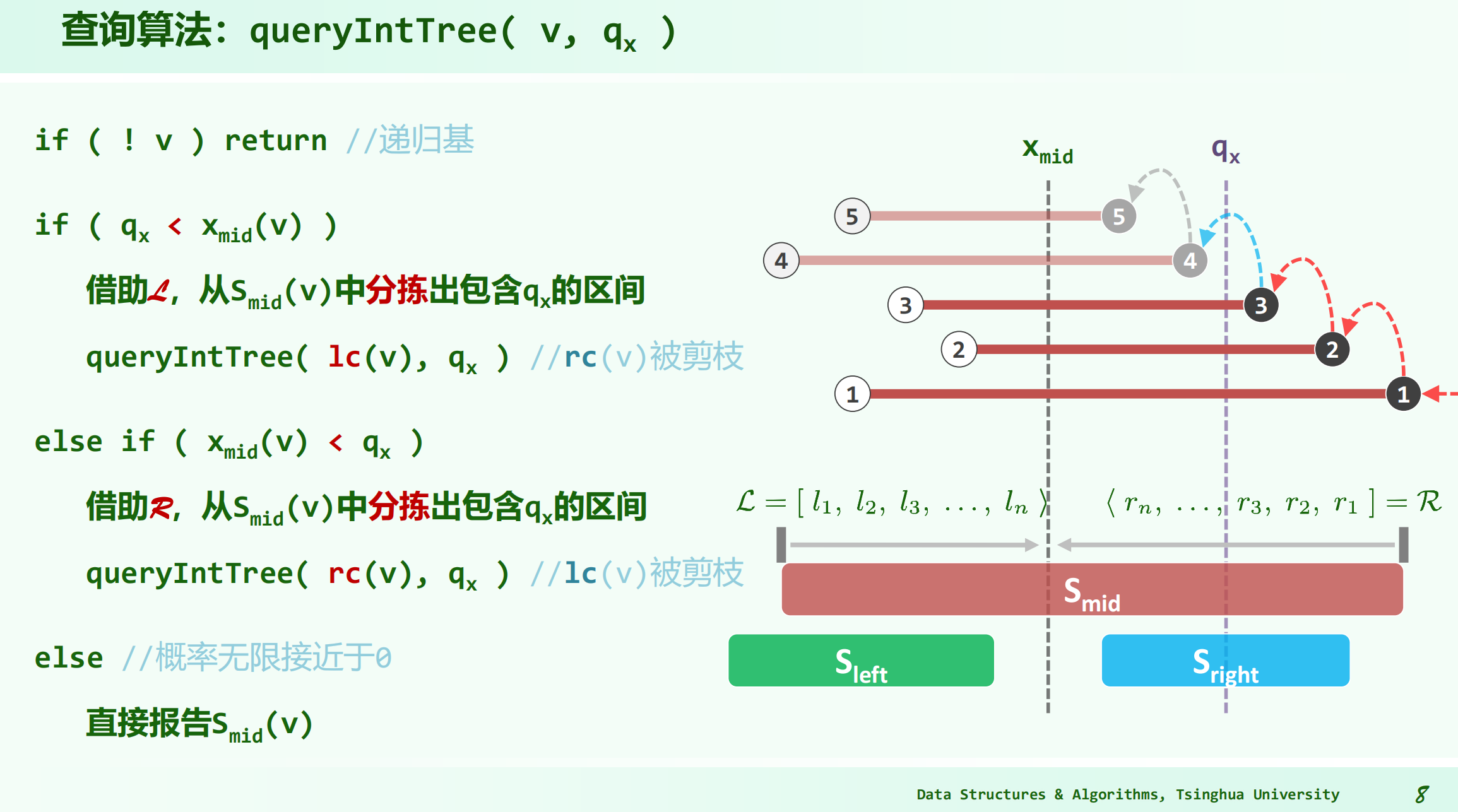
如果 qx 比当前节点的 xmid 要小,说明当前节点所有区间的右端点在 qx 右侧,剪枝右子树,同时在 L(已经有序)中顺序查找哪些区间包含 qx,并在左子树递归。
线段树
对于穿刺查询问题,同一段初级区间的任何位置,穿刺查询结果是相同的。
运用 BBST,叶节点对应每个初级区间 EI,内部节点对应孩子的作用域的并集。可以考虑在每个叶子节点预先记录横跨 EI 的所有区间。但是,如果有 n 个点,会有 O (n) 个 EI,每个区间最坏情况下覆盖 O (n) 个叶子节点,于是空间复杂度在 O (n2)
通过贪心合并,讲原来挂在叶子节点上的区间传递给父亲。兄弟共用一个区间就可以把区间给父亲。对于每个区间,每层最多两个节点相关。(反证,如果有三个连着的必然有兄弟和同一个相关),于是每个区间最多被记录 O (logn) 次,实现 O (nlogn) 的空间复杂度。
为了搭建线段树,需要先把所有端点排序得到 EI,并以所有 EI(没有挂载区间,只是搭建作用域范围)为叶子节点构建完全二叉树。自底向上合并,确定每个节点的作用域。
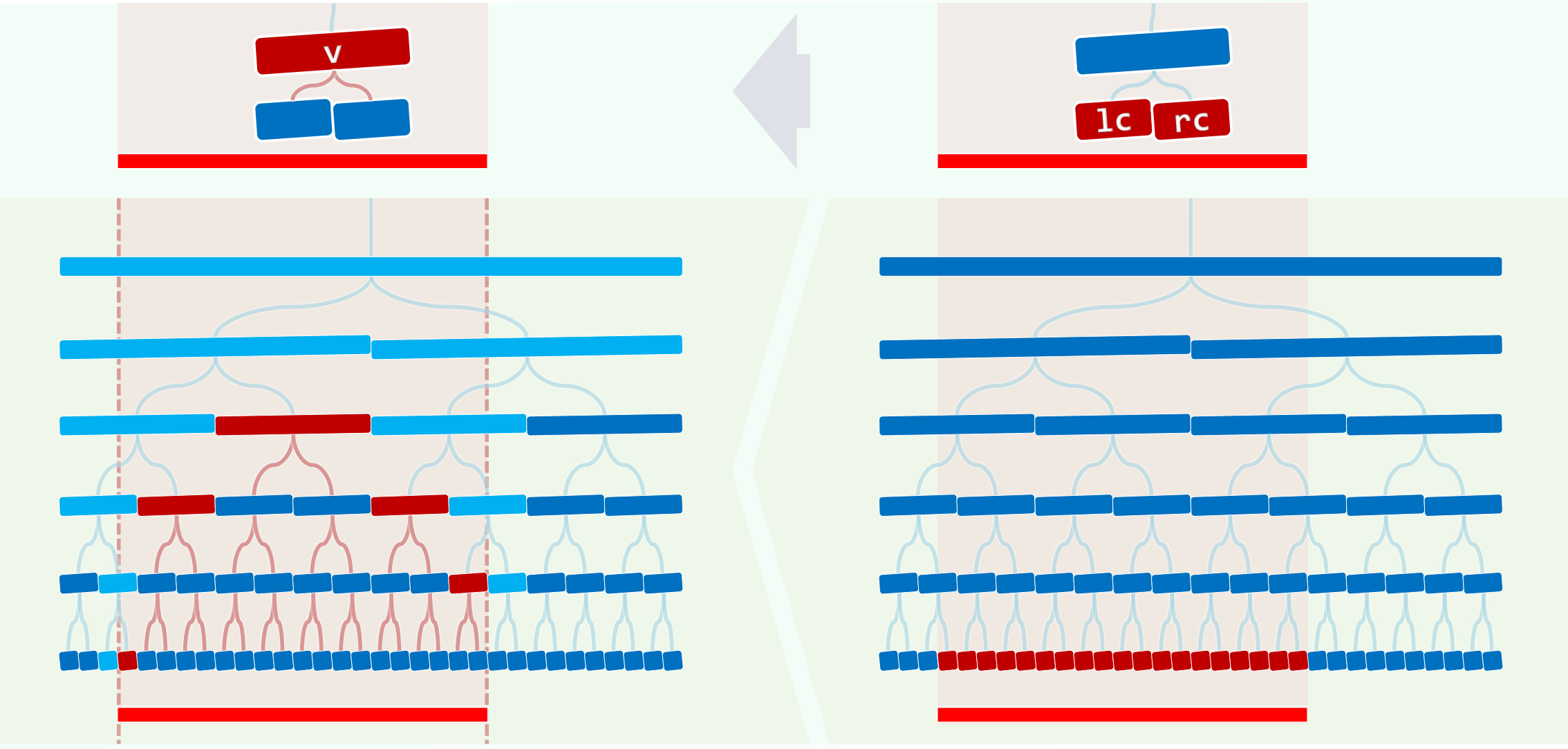
然后对于每段区间插入到 BBST 上。
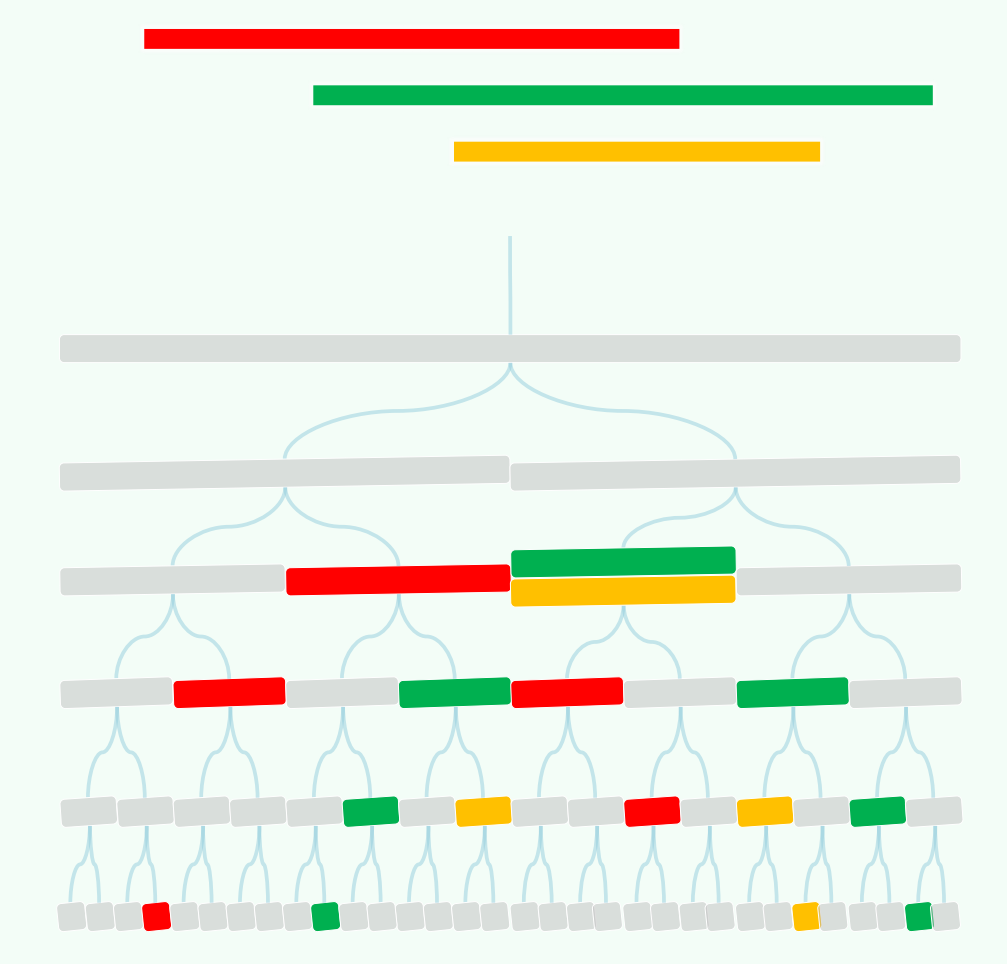
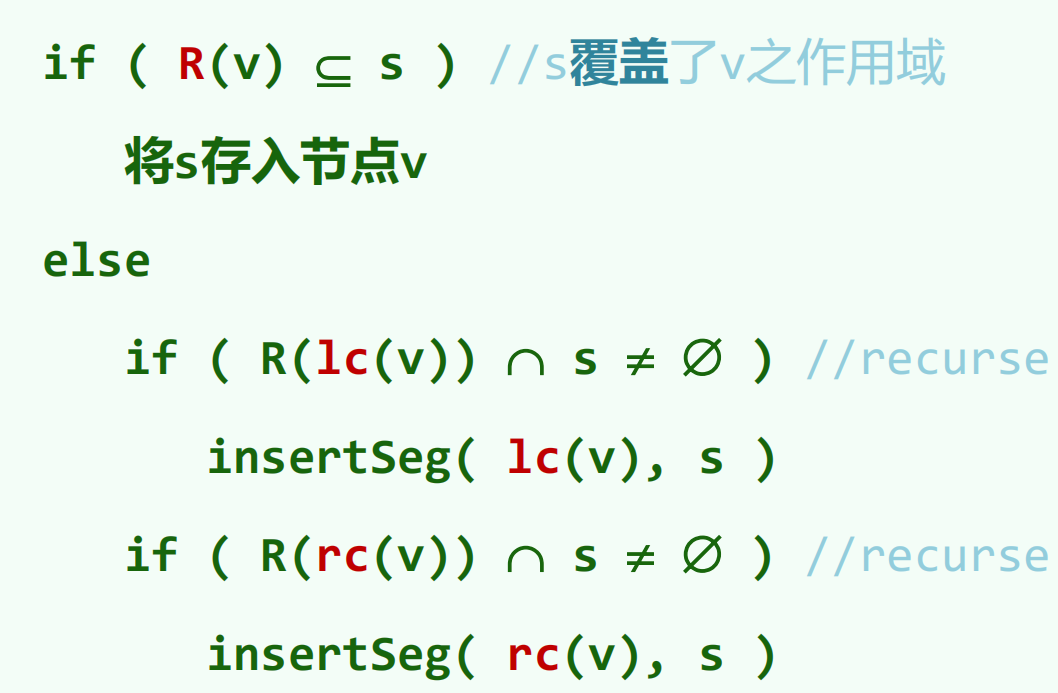
如果区间直接覆盖当前节点作用域就存储副本;判断左右子树作用域谁和当前区间相关,递归。
树的每一层最多访问 4 个节点, 2 个递归 2 个储存副本。每段区间插入只需要 O (logn) 时间。
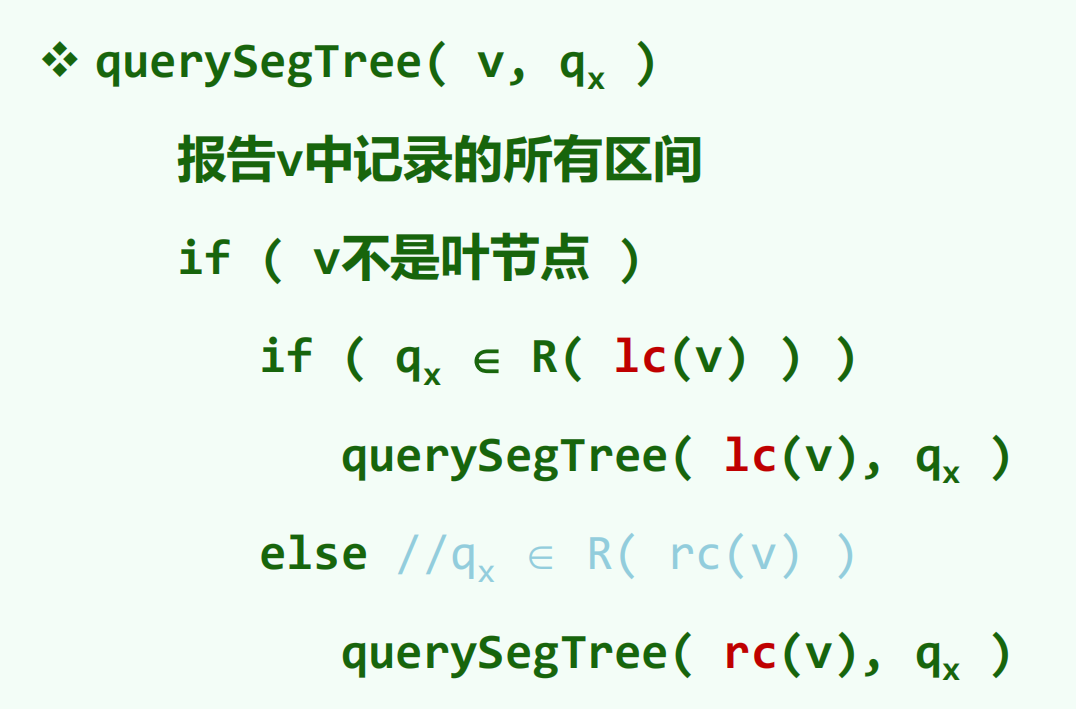
如果发生了 querySegTree (v,qx),说明 qx 一定在 v 的区间作用域内,此时把这个作用域覆盖的所有不同于祖先的区间都在这个点被记录,于是添加这些区间,然后继续递归,直到走到 EI。
每层只访问一个节点,输出所有穿刺区间需要 O®,单词查询需要 O (r + logn) 的时间复杂度。
范围树
正交查询:给定平面点集,对任何矩形区域报告所有落在区域内的所有点。扩展至 n 维。
考虑 2 维问题,相当于 2 次 1 维查询。先筛选出 (x1,x2] 内的点,再筛选出 (y1,y2],但是对时间有浪费。
回归一维问题:
基于叶子的 BBST,由有序的叶子节点搭建起来,内部节点存储路标信息,叶子节点存储实际数值。
在建树时保证了任何一个内部节点的路标数值 = 右子树所有叶子的最小值
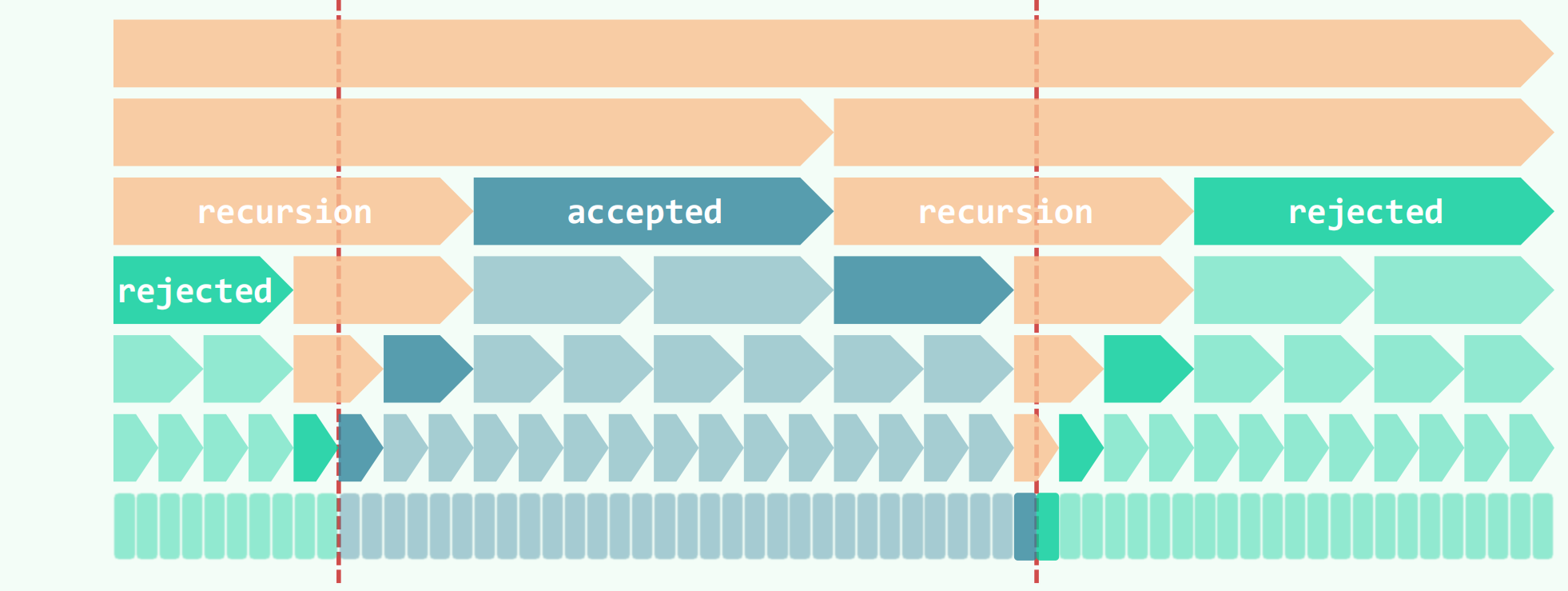
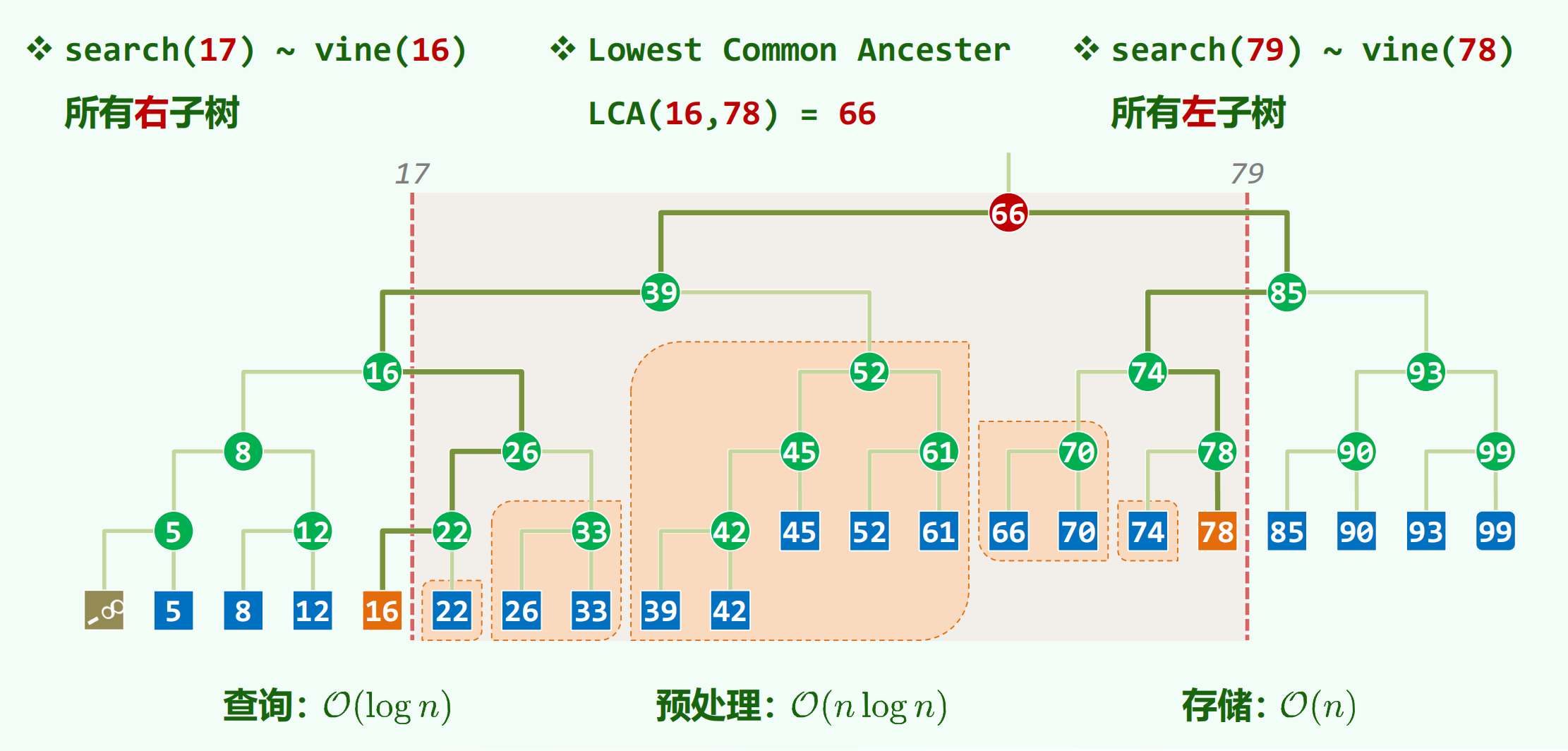 描述了查询的切割过程,离开共同祖先之后,一旦在左藤蔓上向左走,说明左子树是被切割的部分需要发生递归继续切割下一层,而右子树是被包含在内的(建树保证)且不会被右侧切割,于是可以被完整打包。右藤蔓类似,向右走就打包左子树。
描述了查询的切割过程,离开共同祖先之后,一旦在左藤蔓上向左走,说明左子树是被切割的部分需要发生递归继续切割下一层,而右子树是被包含在内的(建树保证)且不会被右侧切割,于是可以被完整打包。右藤蔓类似,向右走就打包左子树。
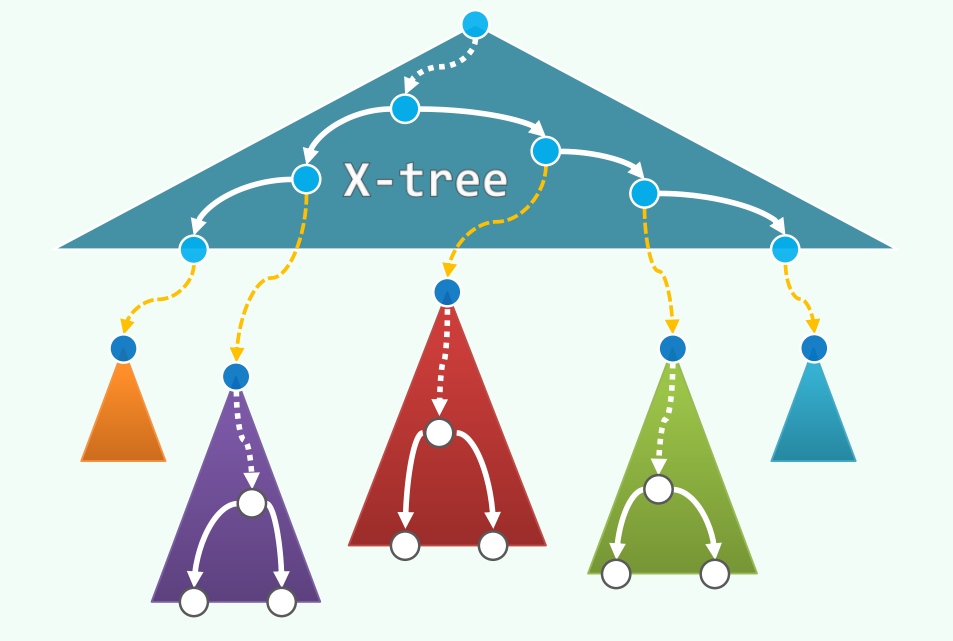
多层搜索树:也就是树套树
可以将原先的一维查询扩展到二维。对于 x 查询构建一棵 x- 树,对于 x- 树中每一个节点,都对应一棵子树 V。构造一棵对应的 yTree (V),可以由 x 查询找到对应的 y- 树。于是还可以扩展到更高维度,MLST:多层搜索树。
经过 x 查询找到 O (logn) 棵子树,找到关联的 O (logn) 棵 y- 树,分别 y- 查询
总计耗时 $\sum^{O (logn)}_{i = 1}{r_i + O (logn)}=O (r + log^2n)$
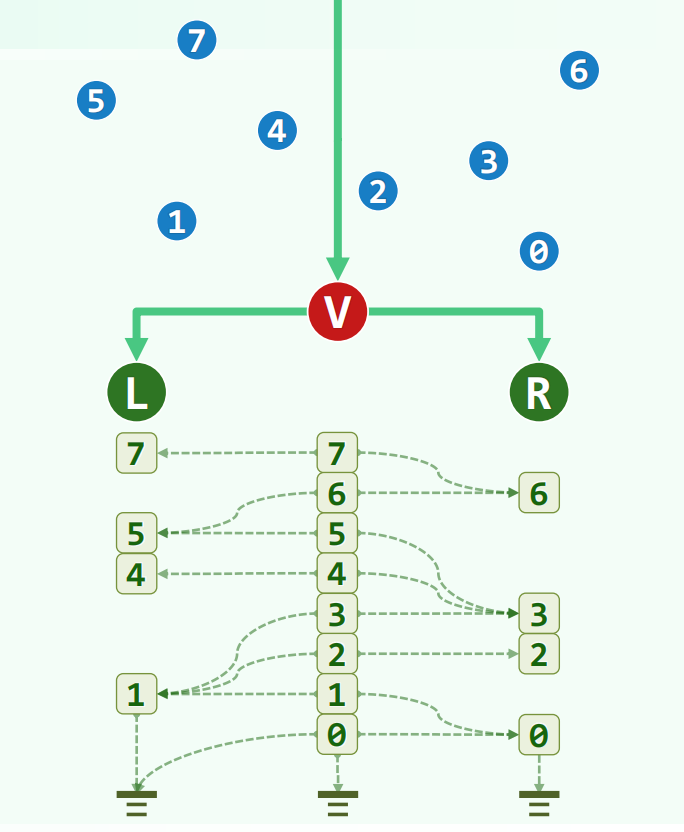
预处理建树阶段,从叶子出发逐层捉对合并,自底向上构造向 x- 树,也同步构造每个节点的 y- 树。每层的所有 y- 树构建时间之和是 O (n),于是总记 O (nlogn)。不能共用一棵 y- 树!因为这样会导致构建起来的新树不是 BBST!
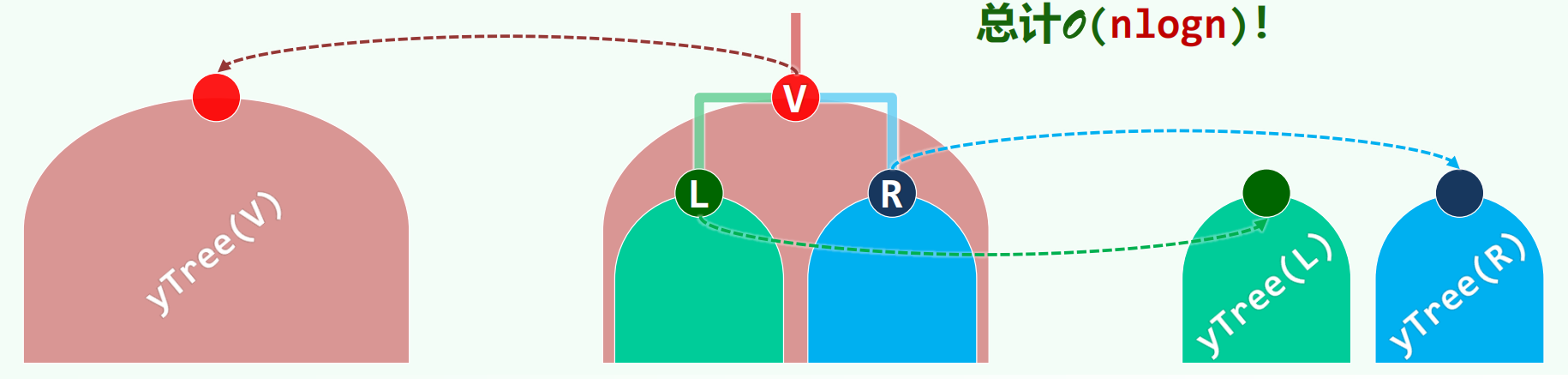
空间角度来看,每层的 y 树互不重叠,且覆盖所有 n 个点,高度 logn,于是空间 O (nlogn)
对于更高维度,可以在 O (nlogd-1n) 构造 d 层 MLST,需要 O (nlogd-1n) 空间,每次范围查询在 O (r + logdn) 完成
分散级联:事实上对于 2 维正交查找,最后一个阶段的 y- 查询可以直接输出,于是用一个有序数组存储、二分查找即可。而这些查找本身 y 的范围是相同的。
于是在父子之间的 y- 列表中建立捷径引用,父亲的二分查找可以直接得到左右儿子的二分查找结果。
在构造树的时候,自底向上逐层合并 y- 列表,二路归并。任何点 P 在即将出列归入父亲的 y- 列表时左右儿子 y- 列表此时首元素就是 P 的捷径应该指向的点。
查找的时候只在 LCA 处对 y- 列表做二分查找。比如对左藤蔓,在逐渐下沉的时候不断更新捷径指针,这样在任何时刻都有当前节点做二分的结果。如果需要把右子树整个统计,由于有当前节点向右的捷径,可以在 O (1) 时间内拿到右子树 y- 列表的二分查找上下端。
引入了分散级联的 MLST 称作范围树。在 O (nlogn) 的时间内构造出一棵二层树,只需要 O (nlogn) 空间,每次二维范围查找可以在 O (r + logn) 时间内完成。